Удочка-автомат
Даже самые робкие попытки переложить на
электронную технику какие-то функции, которые человек привык считать «своими»,
а себя, соответственно, незаменимым, вызывают к себе настороженное отношение.
Не в последнюю очередь это относится к любительскому рыболовству - одному из
самых консервативных по своим формам увлечений человека.
Хотя трудно представить себе более
интересное занятие для радиолюбителя-конструктора. Начиная от самой постановки
возникающих здесь задач, от «алгоритмизации интуиции», до испытания
придуманного. И не в виртуальном пространстве, куда нас последнее время так
настоятельно зовут, а в самом что ни на есть настоящем: под голубым небом,
среди лесов и лугов, с плеском воды и рыбой без штрих-кода.
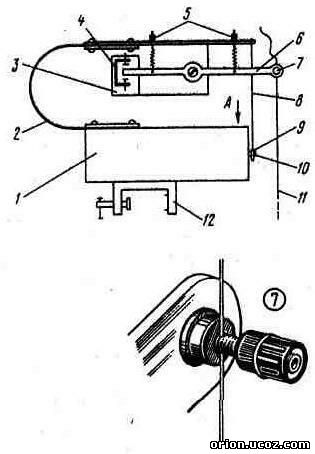
Рис. 1. Кинематическая схема
удочки-автомата
Кинематическая схема устройства,
предназначенного для автоматической подсечки рыбы в сложных условиях лова,
показана на рис.1. Здесь: 1 - корпус, в котором размещена вся электронно-механическая
«начинка» автомата; 2 - плоская пружина, главный движитель автомата; б -
подпружиненное коромысло с зажимом 7 лески 11, образующее со скобой 4,
укрепленной на изолирующей пластине 3, контактную пару; 8 - тяга с серьгой
зацепа 9; 10 - вал редуктора с резьбой МЗ на конце; 12 - струбцина крепления
автомата на борту или кормовом транце лодки.
Во взведенном .состоянии автомат
удерживается сцепкой вала 10 редуктора с серьгой 9. Включенный двигатель
способен мгновенно, за несколько оборотов ротора, разъединить эту сцепку. А вот
в какой момент это произойдет - решит электроника автомата.
Алгоритм его работы прост. Первый же
электрический сигнал датчика, возникающий в момент касания коромыслом 6 скобы
4, переводит автомат в активное состояние: начинается отсчет времени и счет
этих пока еще неясных по происхождению касаний. Если их общее число - и помех,
и поклевок - в этом активном состоянии автомата (его продолжительность
задается) не достигает некоторого числа N (также задаваемого), то автомат вновь
принимает исходное состояние - состояние ожидания. Если же это число
достигнуто, то включается электромотор и - подсечка.
Этот алгоритм и реализуется электронной
«начинкой» автомата, принципиальная схема которой приведена на рис. 2.
Здесь: SF1 - контактная пара
«коромысло-скоба» - датчик системы; SF2 - контактная пара «вал
редуктора-серьга» (редуктор и электродвигатель ставятся на основание-изолятор);
SA1 - тумблер, контакты SA1.2 которого, размыкаясь, обесточивают силовую часть
автомата при его настройке, смене наживки и т.п.; SA2 - переключатель,
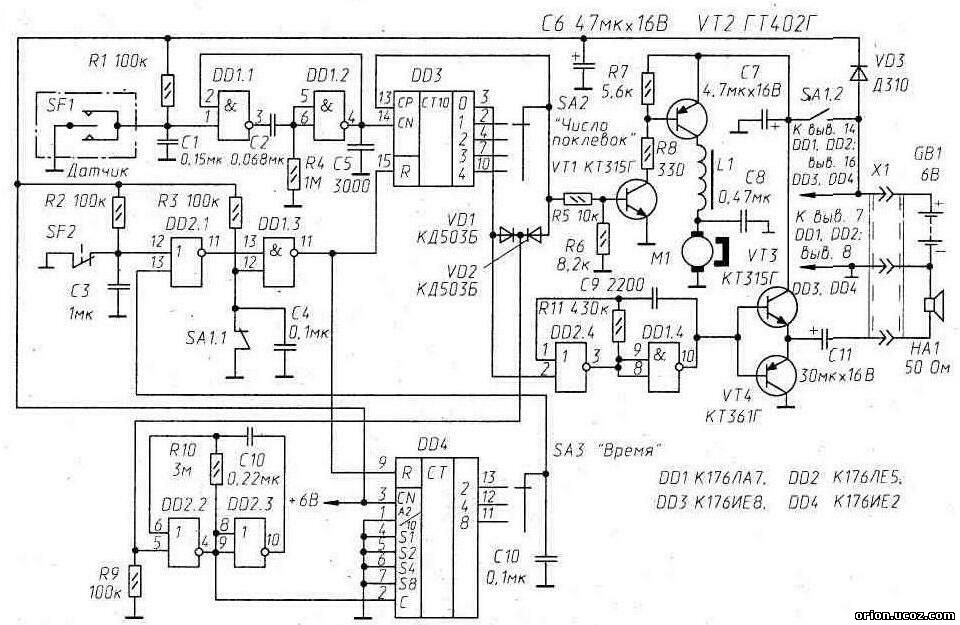
Рис. 2. Принципиальная схема
автомата
которым задают число «поклевок» - N Î{l,2,3,4}; SA3 - переключатель длительности
интервалов активного времени (в секундах) - Т Î{2,
4, 8}.
Элементы DD1.1, DD1.2, С2, R4 составляют
одновибратор, устраняющий ложный счет в DD3 - в счетчике «поклевок» - от
«дребезга» контактов датчика SF1. На элементах DD2.2, DD2.3 собран генератор
тактовых импульсов, следующих с частотой 1 Гц. Счетчиком DD4, суммирующим эти
импульсы, задается время активного состояния автомата. Сброс счетчиков, возврат
автомата в исходное состояние - состояние ожидания - осуществляется импульсами
«единичной» амплитуды, формируемыми элементами DD2.1 и DD1.3. Это происходит
либо по окончании активного времени (при появлении напряжения высокого уровня
на движке переключателя SA3), либо в начале подсечки (при разрыве контактов
SF2), либо при ручном выключении автомата тумблером SA1 - замыкании контактной
пары SA1.1.
На элементах DD2.4, DD1.4 и транзисторах
VT3, VT4 собран управляемый (по входу 2 элемента DD2.4) тональный генератор,
который, возбуждая динамическую головку НА1, сигнализирует рыболову о переходе
автомата в активное состояние.
Транзисторы VT1 и VT2 - электронный ключ
управления электродвигателем M1. Дроссель L1 в LC-фильтре наматывают на
кольцевом магнитопроводе (внешний диаметр - 10...12 мм) из феррита с m=1000...2000. Его обмотка содержит 50...100 витков
провода ПЭВ-2 0.2...0.3.
Плоскую силовую пружину (2 на рис.1) -
основной движитель автомата - изготавливают из полосы фосфористой бронзы
толщиной 0,8 мм.
Ее ширина - 78 и длина (без заделанных концов) - 220 мм. Создаваемое пружиной
начальное усилие при подсечке - 1,3
кг, «мах» - до 750 мм.
Узел 7 - обычная клемма с отверстием для
пропуска лески.
Размеры контактной скобы не критичны, важно
лишь, чтобы между ее контактными площадками и концом перемещающегося между ними
коромысла можно было выставить нужные зазоры: минимум - 1, максимум - 10
мм. Положение коромысла по отношению к контактам скобы
можно изменять натяжением или ослаблением пружин в узлах 5. Общая механическая
прочность всех этих элементов должна быть достаточно высокой, так как они
«держат» рыбу. Во всяком случае 10...15-килограммовые рывки и удары они обязаны
переносить без последствий. Винт-ось, на котором
качается коромысло, должен оказывать ему минимальное сопротивление.
Спусковое устройство автомата и размещение
его деталей в корпусе, склеенном из достаточно толстого (8... 10 .мм) листового
органического стекла или ударопрочного полистирола в виде коробки с накладной
крышкой, показано на рис. 3, а. Электродвигатель 1 - любой малогабаритный
маломощный, например, от электрофицированной игрущки, имеющий на оси малую
шестерню 7 диаметром 5...6 и длиной не менее 5 мм (по ней, вывинчиваясь из
серьги, должна свободно перемещаться большая шестерня 4).
До установки электродвигателя необходимо
проверить качество изоляции его роторной обмотки - сопротивление утечки должно
быть не менее 1 МОм.
Подходящая большая шестерня редуктора,
обеспечивающая четырех-пятикратное замедление, может найтись в той же игрушке.
Другие детали спускового устройства: 6 - вал
редуктора (сталь); 2-его внутренняя
опора (она крепится на «дне» корпуса); 3- мягкая плоская пружина на валу,
выталкивающая его наружу; 5 - бронзовый или латунный подшипник, запрессованный
в стенку корпуса.
Серьгу сцепа вала редуктора с тягой пружины
можно выполнить по варианту, показанному на рис. 3, б. В этом случае в крышке
корпуса должно быть сделано отверстие диаметром около 25 мм (его место на рис.1
отмечено стрелкой А), через которое, вращая большую шестерню редуктора пальцем,
ввинчивают конец его вала в серьгу. Это сцепка очень высокой надежности, она не
подвержена практически никаким посторонним воздействиям. По другому варианту
(рис. 3, в) серьгу, резьба в которой сохранена лишь в нижней
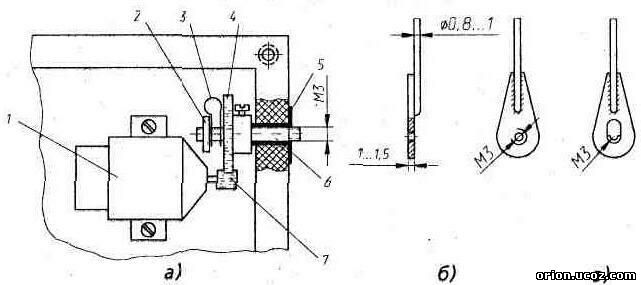
Рис. 3. Элементы конструкции
части ее эллиптического отверстия, просто
набрасывают на выступающий из корпуса конец вала редуктора.
Подсечка начинается с появления «1» -
напряжения, близкого к напряжению питания — на движке переключателя SA2. Это
напряжение блокирует счетный вход счетчика DD3 (по СР; сигналы с датчика SF1
уже не смогут изменить его состояние) и открывая электронный ключ, выполненный
на транзисторах VT1, VT2, включает электродвигатель M1. За 8...10 оборотов его
ротора узел «вал редуктора-серьга тяги» выводится из зацепления и силовая
пружина, резко распрямляясь, производит подсечку. Но уже в момент разъединения
этого узла (контактной пары SF2) на входе 12 элемента DD2.1 возникает
«единичное» напряжение, что ведет к появлению «1» и на входе R счетчика DD3. В
результате счетчик возвращается в свое исходное, «нулевое» состояние, на движке
переключателя SA2 восстанавливается «0» (напряжение, близкое к потенциалу
нулевой шины), транзисторы VT1, VT2 закрываются и электродвигатель, сделав лишь
нужные обороты, отключается.
Перезарядку автомата производят при выключенном
тумблере SA1: его закороченная в этом положении контактная пара SA1.1 «держит»
электронику автомата в предстартовом состоянии.
Запаздывание автомата, т.е. время между
появлением сигнала 1 на движке переключателя SA2 и собственно подсечкой,
зависит от быстроходности и мощности электродвигателя (он может быть сильно
форсирован), замедления редуктора, числа ниток вала, введенных в серьгу, смазки
вращающихся частей и, конечно, состояния источника питания. В изготовленном
экземпляре оно не превышало 0,2 с.
Чувствительность датчика SF1 - 10 г/мм
(усилие - на леске, перемещение — у контактной скобы). Она зависит от мягкости
пружин коромысла.
Источником питания автомата, оснащенного
4-вольтным электродвигателем (от неустановленной игрушки), может быть батарея
из четырех гальванических элементов или аккумуляторов, способных при
кратковременной разрядке (несколько десятых долей секунды) отдать ток 0,5...1
А. Для форсажа электродвигателя напряжение питания может быть и более высоким.
Но, конечно, не выше максимально допустимого для микросхем автомата.
Описанный электронный автомат длительное
время испытывался на морской экспериментальной станции Института биологии моря
Дальневосточного отделения РАН (акватория островов Попова, Рейнике, Рикорда и
др.). Лов велся по-преимуществу донной рыбы
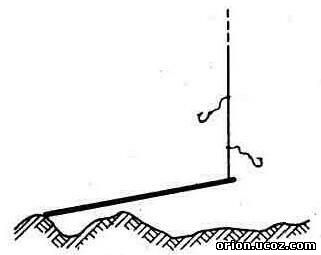
Рис. 4. Оснастка автомата
на глубинах до 20...25 метров. И хотя
особенности морского лова - качка, смещение лодки под ветром, неровности дна, иные
помехи - ставили перед автоматом достаточно трудные задачи, он практически ни в
чем не уступал и опытным рыболовам. А нередко демонстрировал свое
превосходство... Автомат к тому же отличался аккуратной, практически никогда не
повреждающей жизненно важные ткани подсечкой. Это оказалось приятной
неожиданностью, так как рыба ловилась и для пересадки в аквариум.
На рис. 108 показана обычная
оснастка автомата, близкая к принятой в Приморье: основная леска 0,7... 1 мм, поводки - 0,5...0,6 мм
длиной 3...5 см, крючки одинарные №№10...12. Но грузило иное: стальной стержень диаметром 6...8 и длиной 250 мм и более. Такое
грузило и такое его положение у дна позволяют сохранить натяжение лески почти
неизменным и при заметном волнении. Но это - в дополнение к электронным
«размышлениям» самого автомата. Ловля же рыбы «в полводы» вообще не
представляла для него Проблемы. О реальной чувствительности автомата можно было
судить по минимальному весу пойманных экземпляров - 50:..100 г. Максимальный же
вес рыбы ограничивался лишь прочностью поводков.


